


知能制御学系|コマツみらい建機協働研究所
フィールドロボティクス部門
研究室HP石川 将人(所長・教授)、近藤 大祐(特任講師)、小川 哲也(招へい教員)、吉田 侑史(特任助教)、川村 公一(特任研究員)
-
フィールドロボティクス部門とは?
建設機械を進化させ、自動・遠隔化・効率化を実現する
道路や建物の建設現場や鉱山の発掘現場で活躍する建設機械は、私たちの暮らしを陰ながら支えています。本研究室は、建設機械事業で国内トップシェア、世界でも第2位を誇る小松製作所と大阪大学の協働研究所です。建設現場や生産工場現場の生産性を向上させるため、大学ならではの視点・発想を活用し、機械の遠隔制御や自動化、画像処理、センサ、シミュレーションを含めたデータ解析など、幅広い領域を扱っています。柔軟な発想でこれまでにない建設機械を作ったり、熟練のオペレーターの操作技術を機械で自動で再現させるにはどうすればよいかを考えたりしながら、現場の課題の解決を目指します。本物の建設機械を使った研究ができるところは、コマツみらい建機協働研究所のユニークな点です。

-
研究室のユニークPoint !
素人発想から生まれた「変」な研究も大歓迎
大学の研究者は建設機械については素人ですが、だからこそ柔軟な発想ができ、これまでにない建設機械を生み出すことが可能です。たとえば、大きくて硬くて重い建設機械のイメージを覆す柔らかい機械を共同研究で作りました。同時に現場のニーズに応える研究も進めています。土をかいて運ぶショベルカーの操作を自動化するための新たな制御技術の開発や、建設機器の遠隔操縦のために現場の異常を察知するセンサーや操作のしやすさを向上させるためのインターフェースの工夫なども行っています。建設機械が好きな人におすすめの研究室です。
-
研究室の先輩メッセージ
企業の研究者と協働する刺激的な環境
- 平川 龍也(大学院修士課程2年生)
研究室選びの際に建設機械のラジコンを動かす体験をさせてもらい、それが非常に面白かったので、この研究室を選びました。現在は鉱山の未舗装道路の異変検知を自動化する研究に取り組んでいます。センサーで路面の情報を取り出し、色の情報などを合わせて路面の状態を判断します。最終的には建設機械の自律化や自動化につなげていきたいと思っています。学生のアイデアを尊重してくれる環境で、非常にのびのびと研究ができています。企業との協働研究所なので、就職活動のときに現場のニーズの話を聞けたり、企業の目線からアドバイスをいただけることもこの研究室の強みだと思います。
- 古澤 周也(大学院修士課程1年生)
卒論では従来とは違う形の建設機械を研究しました。具体的には、モジュールロボットを使った試みです。モジュールロボットはコンピュータが搭載された小さな立体を組み合わせてさまざまな形を作れるロボットで、現段階ではサイズが小さいため、建設用の機械として導入することはできません。そこで、モジュールロボットを大きくしたらどうなるのかということを研究しています。特につなぎ目の強度がどうなるのかを評価しています。ロボットの開発に興味があってこの研究室に入ってきましたが、実際に入ってみるとかなり幅広いテーマで研究を行っていて驚きました。自分が何をやりたいのかを先生と一緒に考えながら研究を進めていける研究室だと思います。
- 鳥山 裕人(大学院修士課程1年生)
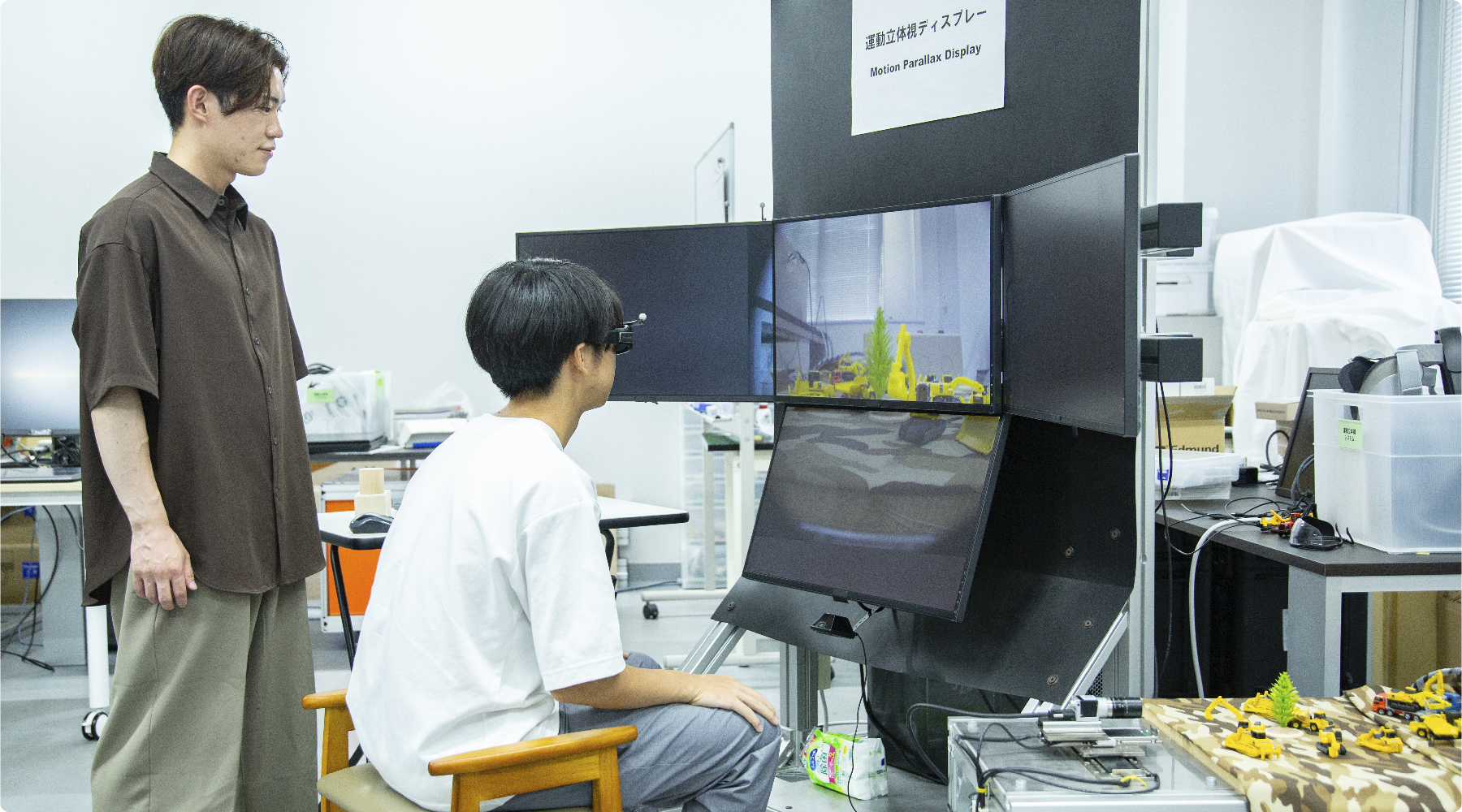
ロボティクスに関する研究に興味があり、この研究室を選びました。また、企業と共同研究をしてる研究室で学べることにも興味がありました。現在、所属している学生は5人で先生が8人です。学生よりも先生が多いので、サポートが手厚いことが特長です。学生主導で自由に研究をさせてもらってます。現在取り組んでいるのは、建設機械を遠隔操作するときに、作業機にどのような負荷が掛かっているのかを操作する人がわかる技術の開発です。作業機の負荷は測定できたとしても、それを数字やグラフなどで伝えても、遠隔で操縦している人には直感的に把握しづらいという問題があります。視覚的な錯覚を使って作業機負荷を伝えられないかということを考えていて、操縦者が見る映像に加工をし、作業機器の負荷や振動や距離感の理解を補うようなものを目指しています。

知能制御学系
フィールドロボティクス部門|コマツみらい建機協働研究所
研究室HP石川 将人(所長・教授)、近藤 大祐(特任講師)、小川 哲也(招へい教員)、吉田 侑史(特任助教)、川村 公一(特任研究員)