知能制御学系|機械動力学領域
石川研究室
研究室HP石川 将人 (教授)、増田 容一(助教)
-
石川研究室とは?
モノが動く仕組みを解明し、新発想のロボットを開発。
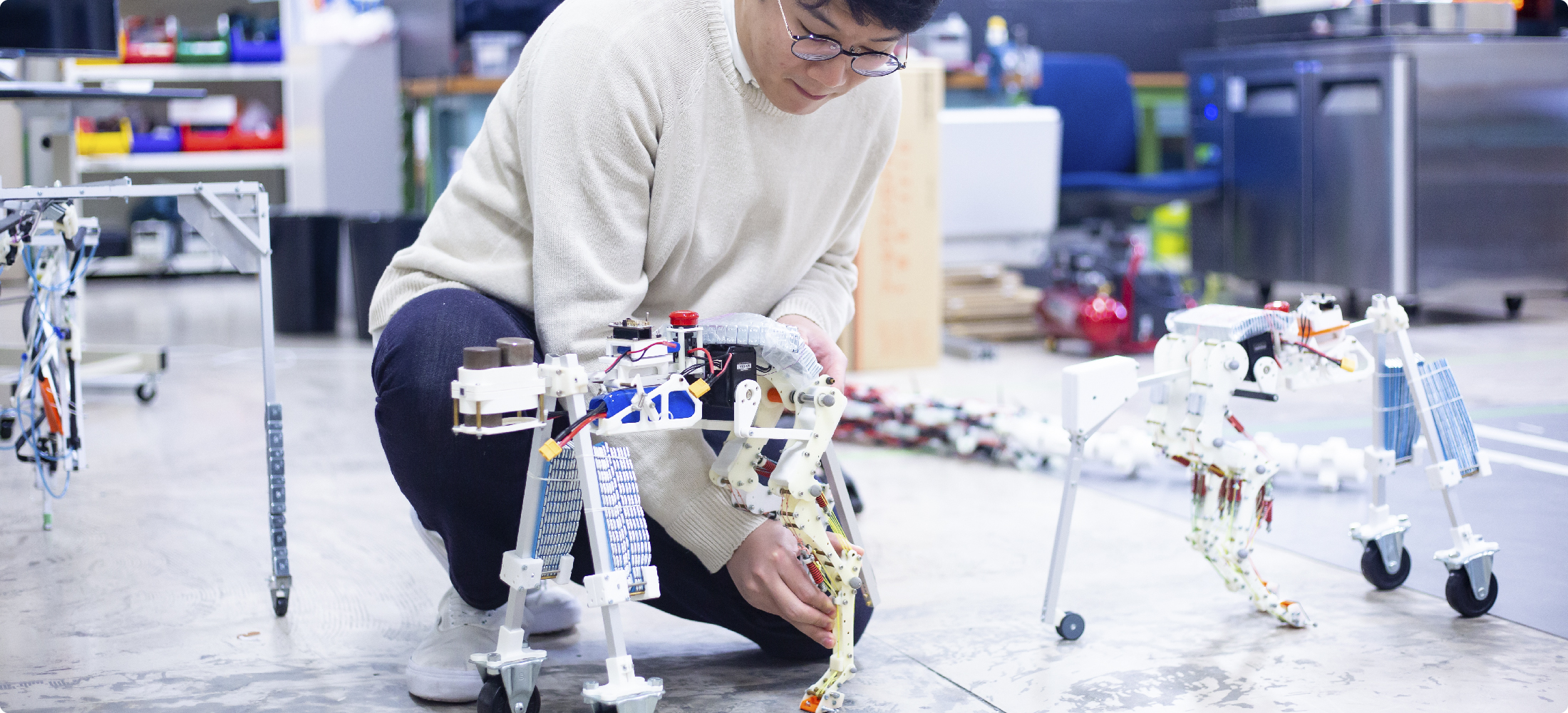
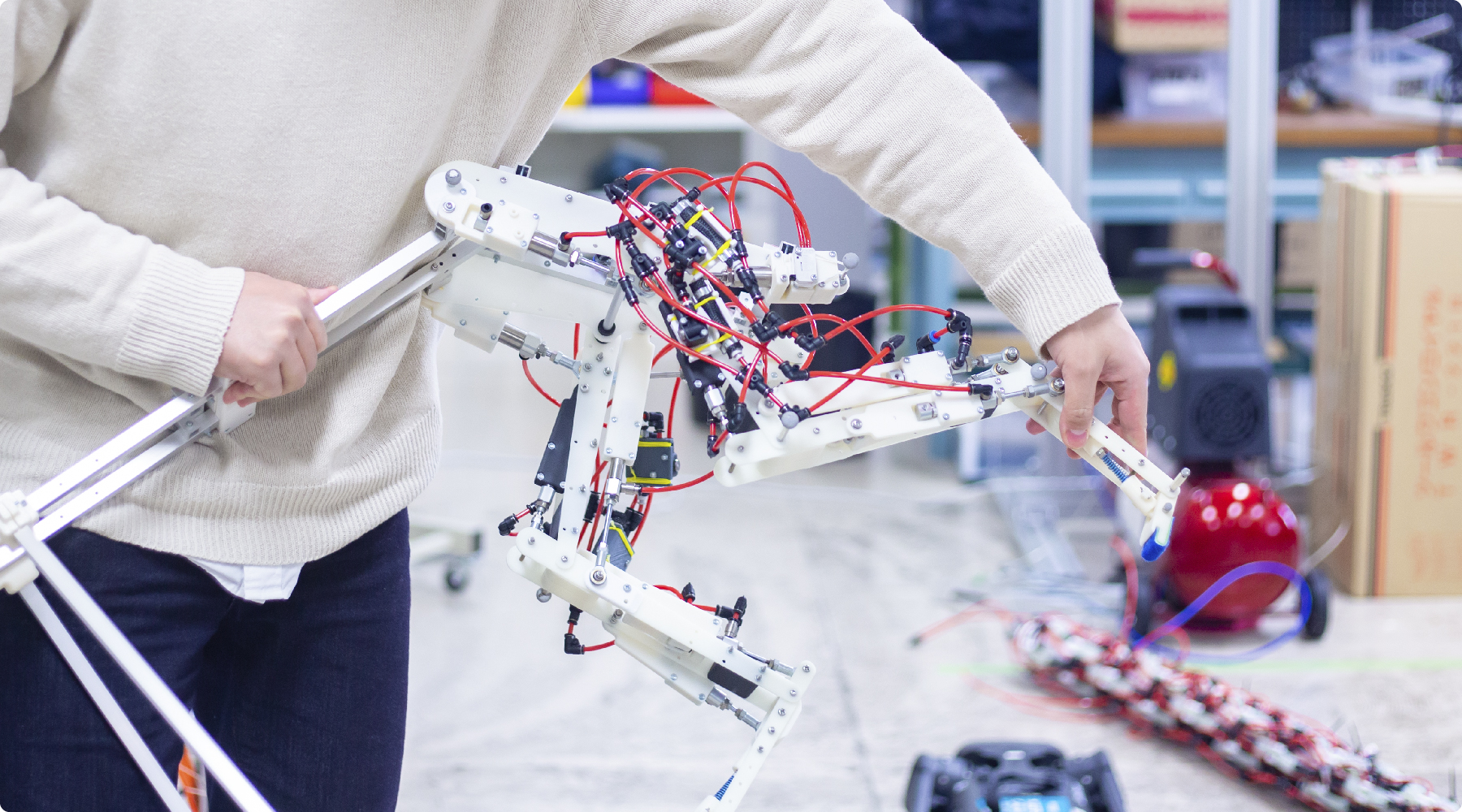
転がる・揺れる・歩く・泳ぐなど「動くもの」に目を向けて、「創る(ロボットづくり)」「知る(学習技術)」「操る(制御理論)」の3本柱から、そのメカニズムの解明と設計に取り組んでいます。研究の対象は幅広く、ひと言でいえば「ロボット」に関する研究です。学問的には「制御工学」といいます。例えば、生き物の仕組みを解明し、生き物のようにいきいきと動き回るロボットの開発。ロボットにもさまざまな種類があり、これまでに「トランポリンロボット」「ヘビ型ロボット」「球体ロボット」「浮遊ロボット」「三つ足ロボット」など、新発想のロボット開発を手がけてきました。一見、社会実装に直結しないように思えますが、工事現場で使われている建設機械をより使いやすく改善するために、「三つ足ロボット」のメカニズムが応用できたりと、「尖った研究」が社会に結びつく可能性も広がっています。
-
研究室のユニークPoint !
その人の自由なアイデアや発想が、研究を飛躍させる。
研究において焦点を当てているのは、「対象」ではなく「方法論」です。モノの仕組みの性質や動かし方を調べる「制御」や「理論」を専門としています。研究の対象は、興味関心が変われば違う対象に変えることもできます。例えば、はじめはカンガルーのジャンプ力に注目して跳ねるロボットをつくっていたけれど、途中からヘビのくねくねする動きを再現したロボットをつくってみてもいい。「対象」が変わっても、変わらない基本原理を「システム思考」と呼んでいて、その原理を知り、原理をもとにロボットをつくる研究を広く展開しています。基本的には、対象も研究方法も自由です。その人のアイデアや発想力が活きる研究領域なので、いい意味で不真面目にアイデアを考えられる人は研究を大いに楽しめると思います。

-
研究室の先輩メッセージ
「制御」は、4つの力学を縫い合わせる「横糸」のような存在。
- 荻尾 優吾(大学院修士課程2年生)
「AI」は多くの情報を与えることで、狙い通りに正しく動くことができます。しかし情報が少ない場合や、間違った情報を与えてしまった場合、「AI」も間違った動作をとってしまいます。わたしの研究テーマは、そうした状況においてもシステム全体で安全性が担保できるような仕組みの構築です。そもそも、機械工学には「機械力学」「材料力学」「熱力学」「流体力学」の4つの力学があり、それらが縦糸だとすると「制御」は横糸のような存在です。縦糸に横糸を通すように4つの力学すべてに対応し、領域を横断しながら柔軟に研究できるところに、「制御」のおもしろさを感じました。ロボットや建設機械など、さまざまなモノを対象に研究するため抽象的な学問ではありますが、それ故に幅広く適応できる知識やスキルを身につけられます。モノの精度が高まると同時に、制御工学も発展していく過程がおもしろいです。